M5Stack の SIM7080G-CAT-M-NB-IOT-UNIT で pivo を使う
128kbps だったら無料、という 0sim を彷彿させるSIMカードが au から登場。
3000円ほどで売られている SIM7080G-CAT-M-NB-IOT-UNIT に挿してみたら、あっさり動作してしまったのでソースとか貼っておく。
SIM7080G CAT-M/NB-IoT Unitshop.m5stack.com
- Arduino-ESP32
- TinyGSM
#define TINY_GSM_MODEM_SIM7080 #define TINY_GSM_RX_BUFFER 650 // なくても動いたけど、あったほうが安定する気がする #define TINY_GSM_YIELD() { delay(2); } // なくても動いたけど、あったほうが安定する気がする #include <TinyGsmClient.h> #define apn "povo.jp" #define server "api.wakwak-koba.jp" #define port 80 #define url "/test/" TinyGsm modem(Serial1); TinyGsmClient client(modem); void setup() { Serial.begin(115200); Serial1.begin(9600, SERIAL_8N1, 32, 26); // ATOM LITE delay(1000); Serial.println("restart modem"); modem.restart(); Serial.println("wait for network connected "); modem.gprsConnect(apn, "", ""); // 不要かも(初回だけ必要かも) if (modem.waitForNetwork() && modem.isNetworkConnected()) { Serial.print("connecting to "); Serial.println(apn); modem.gprsConnect(apn, "", ""); if(modem.isGprsConnected()) { Serial.print("connecting to "); Serial.println(server); if (client.connect(server, port)) { Serial.print("get "); Serial.println(url); client.println(); client.printf("GET %s HTTP/1.1\r\n", url); client.printf("Host: %s\r\n", server); client.print("Connection: close\r\n\r\n"); client.println(); while (client.connected()) while (client.available()) Serial.print((char)client.read()); Serial.println(); client.stop(); modem.gprsDisconnect(); } } } Serial.println("disconnected"); } void loop() { delay(1); }
M5Stack を電子コンパスとして利用するにあたり、磁気センサーを校正するやつ(校正値を算出)
起動させたら、いきなり校正モードに入るので、筐体を前後左右ありとあらゆる方角に傾けてみて、3軸の各値が最大・最小を示す地点を探し当てるかのごとく、100秒間グリグリやって下さい。
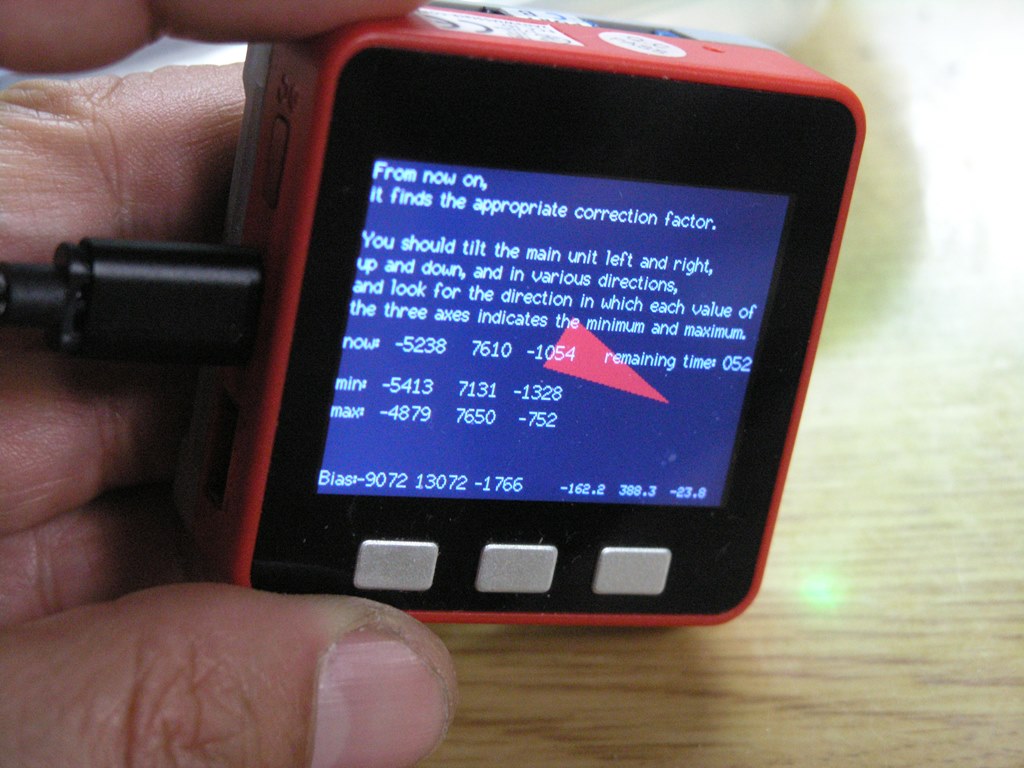
そうすると、
IMU.magbias[0] = XXXX; IMU.magbias[1] = YYYY; IMU.magbias[2] = ZZZZ;
に記述すべき数値が表示されるので、それをスケッチに書き入れます。
電子コンパスのサンプルソースはこちら
wakwak-koba.hatenadiary.jp
cariburateIMU.ino
// define must ahead #include <M5Stack.h> // #define M5STACK_MPU6886 #define M5STACK_MPU9250 // #define M5STACK_MPU6050 // #define M5STACK_200Q #include "MovingAverage.hpp" #include <LovyanGFX.hpp> #define _M5DISPLAY_H_ class M5Display {}; #include <M5Stack.h> static LGFX lcd; static LGFX_Sprite sprite(&lcd); #include "utility/MPU9250.h" MPU9250 IMU; MovingAverage<int16_t> mg_0(1000); MovingAverage<int16_t> mg_1(1000); MovingAverage<int16_t> mg_2(1000); float temp = 0.0F; // the setup routine runs once when M5Stack starts up void setup(){ // Initialize the M5Stack object M5.begin(); M5.Power.begin(); M5.IMU.Init(); IMU.initMPU9250(); delay(100); IMU.initAK8963(IMU.magCalibration); lcd.init(); lcd.setColorDepth(16); sprite.setColorDepth(8); sprite.createSprite(320, 240); sprite.setTextColor(TFT_WHITE); } // the loop routine runs over and over again forever void loop() { if (IMU.readByte(AK8963_ADDRESS, AK8963_ST1) & 0x01) { IMU.readMagData(IMU.magCount); IMU.getMres(); int count = mg_0.setValue(IMU.magCount[0]); mg_1.setValue(IMU.magCount[1]); mg_2.setValue(IMU.magCount[2]); IMU.magCount[0] = mg_0.getAverage(10); IMU.magCount[1] = mg_1.getAverage(10); IMU.magCount[2] = mg_2.getAverage(10); float mg[3]; mg[0] = (float)IMU.magCount[0] * IMU.mRes * IMU.magCalibration[0] - IMU.magbias[0]; mg[1] = (float)IMU.magCount[1] * IMU.mRes * IMU.magCalibration[1] - IMU.magbias[1]; mg[2] = (float)IMU.magCount[2] * IMU.mRes * IMU.magCalibration[2] - IMU.magbias[2]; float at = atan(mg[0] / mg[1]); float x = cos(PI / 2 - at) * 20; float y = sin(PI / 2 - at) * 20; sprite.clear(); sprite.setTextSize(1); sprite.fillTriangle(160 - x, 120 - y, 160 + x, 120 + y, 160 + mg[1] / 4, 120 - mg[0] / 4, TFT_RED); sprite.setFont(&fonts::Font2); sprite.setCursor(0, 0); sprite.println("From now on,"); sprite.println("it finds the appropriate correction factor."); sprite.println(); sprite.println("You should tilt the main unit left and right,"); sprite.println("up and down, and in various directions,"); sprite.println("and look for the direction in which each value of "); sprite.println("the three axes indicates the minimum and maximum."); sprite.setCursor(200, 120); sprite.printf("remaining time: %03d", 100 - count / 10); sprite.setFont(&fonts::Font2); sprite.setCursor(0, 120); sprite.printf("now: %6d %6d %6d", (int16_t)IMU.magCount[0], (int16_t)IMU.magCount[1], (int16_t)IMU.magCount[2]); sprite.setCursor(0, 150); sprite.printf("min: %6d %6d %6d", mg_0.getMin(), mg_1.getMin(), mg_2.getMin()); sprite.setCursor(0, 170); sprite.printf("max: %6d %6d %6d", mg_0.getMax(), mg_1.getMax(), mg_2.getMax()); IMU.magbias[0] = IMU.mRes * IMU.magCalibration[0] * (mg_0.getMax() + mg_0.getMin()) / 2; IMU.magbias[1] = IMU.mRes * IMU.magCalibration[1] * (mg_1.getMax() + mg_1.getMin()) / 2; IMU.magbias[2] = IMU.mRes * IMU.magCalibration[2] * (mg_2.getMax() + mg_2.getMin()) / 2; sprite.setCursor(0, 220); sprite.printf("Bias:%d %d %d", (int16_t)IMU.magbias[0], (int16_t)IMU.magbias[1], (int16_t)IMU.magbias[2]); sprite.setFont(&fonts::Font0); sprite.setCursor(180, 226); sprite.printf(" %6.1f %6.1f %6.1f", mg[0], mg[1], mg[2]); sprite.pushSprite(0, 0); if (count == 1000) { lcd.clear(); lcd.setFont(&fonts::Font2); lcd.setCursor(0, 0); lcd.printf("IMU.magbias[0] = %d;", (int16_t)IMU.magbias[0]); lcd.println(); lcd.printf("IMU.magbias[1] = %d;", (int16_t)IMU.magbias[1]); lcd.println(); lcd.printf("IMU.magbias[2] = %d;", (int16_t)IMU.magbias[2]); lcd.println(); Serial.printf("IMU.magbias[0] = %d;", (int16_t)IMU.magbias[0]); Serial.println(); Serial.printf("IMU.magbias[1] = %d;", (int16_t)IMU.magbias[1]); Serial.println(); Serial.printf("IMU.magbias[2] = %d;", (int16_t)IMU.magbias[2]); Serial.println(); while(1); } } delay(100);
MovingAverage.hpp
#ifndef _WAKWAK_KOBA_MOVING_AVERAGE_ #define _WAKWAK_KOBA_MOVING_AVERAGE_ #include <stdint.h> template<typename T> class MovingAverage { public: MovingAverage(int buffer_size = 100) { this->buffer_size = buffer_size; buffer = new T[buffer_size]; } ~MovingAverage() { delete []buffer; } int setValue(T value) { buffer[index++] = value; if(index >= buffer_size) index = 0; return ++count; } T getAverage(int max_count = 0) { if(!max_count) max_count = min((unsigned long)count, (unsigned long)buffer_size); else if(count < max_count) max_count = count; else if(max_count > buffer_size) max_count = buffer_size; int idx = index - 1; int sum_count = 0; float sum_value = 0; for(; sum_count < max_count; sum_count++) { if(idx < 0) idx += buffer_size; sum_value += (float)buffer[idx--]; } return (T)(sum_value / sum_count); } T getMin(int max_count = 0) { if(!max_count) max_count = min((unsigned long)count, (unsigned long)buffer_size); else if(count < max_count) max_count = count; else if(max_count > buffer_size) max_count = buffer_size; int idx = index - 1; int sum_count = 0; T result = 0; for(; sum_count < max_count; sum_count++) { if(idx < 0) idx += buffer_size; T value = buffer[idx--]; result = !sum_count ? value : min(result, value); } return result; } T getMax(int max_count = 0) { if(!max_count) max_count = min((unsigned long)count, (unsigned long)buffer_size); else if(count < max_count) max_count = count; else if(max_count > buffer_size) max_count = buffer_size; int idx = index - 1; int sum_count = 0; T result = 0; for(; sum_count < max_count; sum_count++) { if(idx < 0) idx += buffer_size; T value = buffer[idx--]; result = !sum_count ? value : max(result, value); } return result; } protected: private: int buffer_size; volatile T* buffer; volatile unsigned long count = 0; volatile unsigned int index = 0; }; #endif